lolistio
lol istio
开启服务网格后,经常会遇到一个问题:如何保证sidecar容器启动并且就绪后,再启动app容器?
默认app容器和sidecar容器是同时启动的。由于init container已经先启动,并且设置了iptables规则,将流量导给了sidecar,如果app容器在sidecar容器就绪之前就启动了,可能app容器发起的网络连接会全部失败,有些应用对网络比较敏感,可能会遇到需要重启多次才能正常运行的问题。
社区有人提过 sidecar type container 的概念,即将sidecar明确作为一个特殊的container类型,其在普通container启动之前启动、在普通container停止之后停止。这样,sidecar可以为app容器提供比较稳定的运行环境。
该提议一直没有得到允许。
不过,k8s本身提供了一个机制:Pod中的container是按照出现顺序启动的,若container设置了 post-start 阶段,则必须等待该container执行完 post-start 后,才会启动下一个container。
基于此,社区有人设计了一个解决启动顺序的方案。
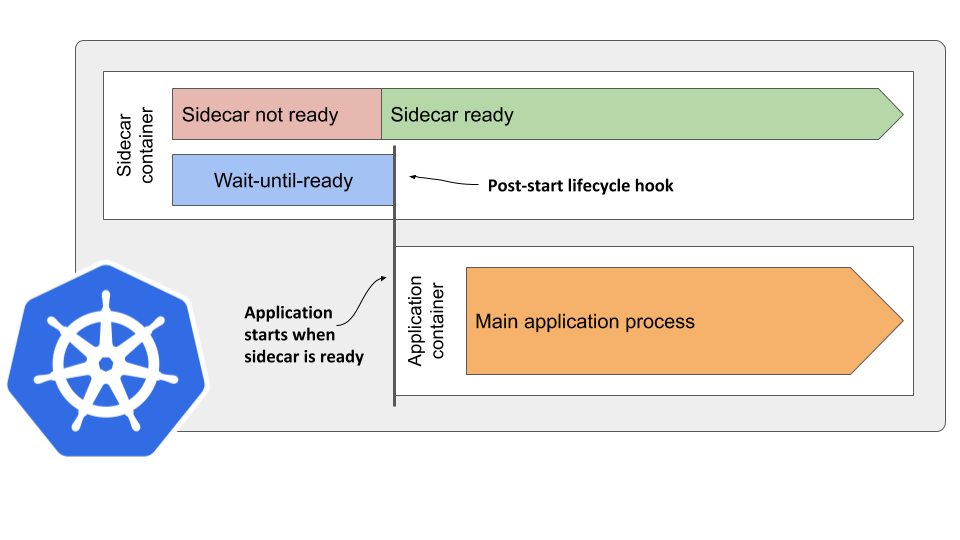
具体的Pod看上去如下。
apiVersion: v1
kind: Pod
metadata:
name: sidecar-starts-first
spec:
containers:
- name: sidecar
image: my-sidecar
lifecycle:
postStart:
exec:
command:
- /bin/wait-until-ready.sh
- name: application
image: my-application
和启动阶段不同,k8s在删除Pod时,是并行停止container的,所以关停Pod的时候,仍然是会出现 app container 网络中断的问题。
一个可能的解决办法是,在sidecar的pid 1中,响应SIGTERM信号,在SIGTERM信号处理函数中,检查 pilot-agent/envoy 被动建立的连接是否还存在,如果还存在,则表示app container还未退出,则进行等待。
当app container退出后,相应的连接会关闭,此时再关闭pilot-agent/envoy进程,可以保证app container的网络在Pod删除时可用。
Ref: